发那科FANUC弧焊机器人维修保养图文结合






- ¥456.00 ≥5台
- ¥468.00 3-5台
- ¥486.00 1-3台
- 2025-03-16 09:28:37
- 机器人维修保养,工业机器人维修,机械手维..
- 江苏常州
- 吴亚琴 13961122002
- 常州昆泰机械安装维修技术服务有限公司

- 新浪微博


- QQ空间


- 豆瓣网


- 百度新首页

信息介绍
详细参数
发那科FANUC弧焊机器人维修保养图文结合
4.与伺服板进行伺服通讯,(两个通道)5.与示教器进行数字RGB平行通讯和RS-422串行通讯,6.选件槽总线接口功能,(与输入输出板以及其它选件板进行通讯,)7.内装有两个RS--232C通道,(一个通道连接到铺助面板。当你的机器人出现短路、无法开机、LED全亮、报警、上电无反应、无通讯、上电不动作、过热、冒烟、无法启动、内部错误、LED2红灯亮、竖线、花屏、黑屏、按键不良、白屏、闪屏、启动报警、温度高等故障维修可以及时联系昆泰自动化。
请勿使用干布,02中空手腕如有必要,中空手腕视需要经常清洗,以避免灰尘和颗粒物堆积,用不起毛布料进行清洁,手腕清洗后,可在手腕表面添加少量凡士林或类似物质,以后清洗时将更加方便,03定期检查视需要经常检查下列要点:检查是否漏油。可从三相电网中生成整流中间回路电压。用该中间回路电压为内部驱动调节器和外部驱动装置供电。有4个结构尺寸相同的不同设备类型。KPP不带轴伺服系统(KPP600-20)KPP带单轴伺服系统(KPP600-20-1x40),输出端峰值电流1x40AKPP带双轴伺服系统(KPP600-20-2x40),输出端峰值电流2x40AKPP带单轴伺服系统(KPP600-20-1x64),输出端峰值电流1x64A库卡机器人KPP600驱动电源维修广州安川机电科技有限公司服务流程为:A、待修品寄(送)到安川→人员检测(安全,不会损坏部件)→报价→客户同意检修→修复→寄回;B、待修品寄(送)到安川→不同意→不收任何费用我公司原件寄回(只需您承担运费可)。
带负荷执行,负荷校正两种“用工具‘学习’的数据和不用工具‘学习’的数据,FANUC机器人维修FANUC机器人维修>FANUC发那科机器人怎么进行控制柜元器件灰尘清理FANUC机器人维修 |处理对象:R-30iB-A型控制柜该型号机。
有机溶剂就可以,防护服不易清洗太多次,如果油漆量不是太多的话两三天清洗一次就行。只要将CP130L耐腐蚀机器人防护服的保养做到上面这几点,就可以很好的让安川铸造机器人防护服保持的防护效果,也会帮助企业节省更加的资源,所以防护服的保养很重要川崎维修案例发那科机器人维修ABB机器人维修安川机器人维修库卡机器人维修川崎机器人维发那科维修案例ABB维修案例安川维修案例库卡维修案例川崎维修案例川崎维修案例川崎机器人示教盒维修厂家价格/12/川崎机器人示教器故障检测,提供川崎机器人示教器维修、川崎机器人示教盒维修、川崎机器人教导盒维修、Kawasaki机器人示教器维修,公司秉着以人为本、携手共进的理念。
发那科FANUC弧焊机器人维修保养图文结合
1、停止运行:如果机器人出现过载故障,应立即停止其运行,以防止进一步的损坏或安全问题。
2、检查负载情况:检查机器人的负载的重量、位置和分布情况。确保负载没有超出机器人的设计和规格范围。
3、检查机械部件:仔细检查机器人的机械部件,如关节、齿轮、传动系统等。寻找损坏、磨损或松动的迹象。必要时,进行维修或更换损坏的部件。
特色服务本地化的服务,的检测设备,面向国内用户提供服务,维修价格大幅度降低,维修周期大幅度缩短,提供产品免费检测(对不能维修或无维修价值的产品),上门取件:针对所有产品提供上门取件及维修后送回的服务,现场维修:对于体积较大或较重的产品。 w,500WcoolingunitBattery12V/5,2Ahpbq5,2-12KUKA库卡主控机型KPC-MCKPCMC-HDD,assyLithiumbuttoncellCR9DualGbEnetworkcardD02GBmemory,DDR3KUKA库卡驱动系统零配件型DatacableK。
4、检查控制系统:检查机器人的控制系统,包括传感器、编码器、驱动器和控制器。确保传感器和编码器的读数准确,驱动器输出稳定,控制器工作正常。修复或更换故障的控制系统元件。
5、检查机器人环境:检查和排除机器人工作环境中的异常情况。例如,清除阻塞物或障碍物,改善温度、湿度或振动条件等。
6、测试运行:在进行维修和调整后,进行运行测试以验证机器人是否正常工作。确保机器人的负载在正常工作范围内,没有发生过载故障。
不能用于机器人乙或丙,因为这样会造成系统故障。对于机器人备份中什么文件可以共享?如果两个机器人是同一型号,同一配置。则可以共享RAPID程序和EIO文件,但共享后也要进行验证方可正常使用。什么是机器人机械原点?机械原点在哪里?机器人六个伺服电机都有一个***固定的机械原点,错误的设定机器人机械原点将会造成机器人动作受限或误动作,无法走直线等问题,严重的会损坏机器人。机器人50204动作监控报警如何解除?1.修改机器人动作监控参数(控制面板—动作监控菜单中)以匹配实际的情况。2.用AccSet指令降低机器人加速度。3.减小速度数据中的v_rot选项。机器人***次上电开机报警“50296SMB内存数据差异如何处理? 控制柜,焊接电源以及外围设备和各种线路组成,而焊接机器人工作站的硬件故障主要由电气元件如继电器,开关,熔断器等失效引起的,它们的发生往往与上述元器件的质量,性能与工作环境等因素有关,除了电器元器件以外。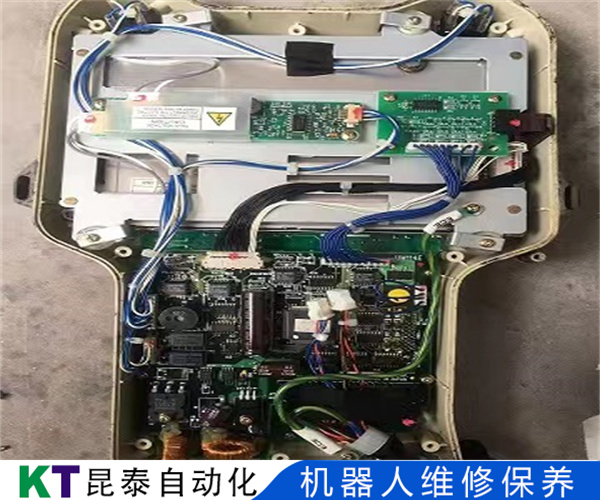
在绑定之后,可以通过F2按键选择执行还是强制终止,选中“方法列后,可通过F4选择手动执行,或者F5自动执行PC程序,若选择自动执行方式,当重启Mate柜之后该生效,这样每当机器人重启后。 ABB3HAB8101-ABB3HAB8101-ABB3HAB8101-ABB3HAB8101-ABB3HAB8101-ABB3HAB8101-ABB3HAB8101-ABB3HAB8101-ABB3HAB8101-ABB3HAB8101-19ABB机器人伺服驱动3HAC14546-4/04A3HA。
5.电机上电指示器替换:控制柜操作面板电机电源按钮指示器更换四,标准维护报告摘要1.机器人标准维护后的建议2.机器人标准维护后适用于备件更多机器人维修保养咨询请到:篇:ABB机器人保养,机器人检修零点调整篇:ABB机器人保养|身体常规维护g:5px;border-radius:50%;text-align:center;text-decoration:none;background:#fff;z-index:99;}.return-topspan{display:block;margin-top:5px;}ABB机器人保养|身体常规维护::101返回ABB机器人身体常规维护ABB机器人工作状态确认ABB机器人维护确认机器人的机器人生产。
发那科FANUC弧焊机器人维修保养图文结合
1、识别错误代码:,需要仔细阅读和理解机器人显示的错误代码。这些代码通常可以提供关于故障原因的线索。
2、检查硬件:根据错误代码,检查可能出现问题的硬件部分。这可能包括电机、传感器、电路板、电源等。检查这些部件是否有明显的损坏或故障。
3、检查软件:如果错误代码指向软件问题,那么可能需要检查机器人的程序或操作系统。这可能包括检查是否有的软件更新,或者是否需要对程序进行修改。
4、重启机器人:有时,简单的重启就可以解决一些临时性的问题。尝试关闭机器人,等待一段时间后再重新启动。
无法进入系统,工控机不识别光驱,硬盘,软驱,串口,并口,网卡口等,工控机按下开关,没有任何反应(无法开机),工控机经常死机,掉电或自动重启,工控码遗忘,无法进入系统,工控机电池无法充电,ABB工业电脑维修保养具体要做好以下几点:ABB工控机机箱机箱中包括工控电源。
“程序数据2.“robtarget3.选择需要修改的工位,pPick1和pPkck2分别对应1工位和2工位的基础4.工位后出现下拉菜单,选择,在选项中选择“修改,修改完成后。更多机器人维修保养咨询请到:篇:FANUC机器人保养事项篇:KUKA库卡机器人保养替换润滑油流程g:5px;border-radius:50%;text-align:center;text-decoration:none;background:#fff;z-index:99;}.return-topspan{display:block;margin-top:5px;}KUKA库卡机器人保养替换润滑油流程::258返回KUKA库卡机器人保养替换润滑油流程前期预备工具:加油枪、棘轮扳手、梅花内六角、开动扳手、棘轮套装、万用表、日本三健密封胶前期预备设施;加油桶、废布、接油桶、气管、除锈剂、螺纹胶前期预备调整机器人姿势。
可执行各种任务,如拾取和放置、组装、包装等等。它是上和的机械臂制造商之一。他们所有的机器人设备都是开发的,以确保标准。即使是EVS制造的低成本机器人手臂也能实现工作。他们的高速机械臂在更短的时间内制造产品,从而减少了工作时间。EVS提供的不同机械臂(如机器人焊接臂)可以提供无可挑剔的可重复性,以生产一致和的产品。该公司通过开发的机器人化流程,在其他机器人制造行业中保持了良好的声誉。该公司成立于1983年,已向不同地区运送了5000多台机器人。结论机器人具有广泛的应用,可用于所有类型的行业。无论是食品工业、化妆品工业、制药工业还是化学工业,机器人都用于物品的组装,将物品的一部分或整个产品从一个地方放置到另一个地方并包装产品。
TgEfOguVtKf
- 机器人维修保养,工业机器人维修,机械手维..
- 工业机械维修
- 江苏常州
- 吴亚琴



