常州昆泰机械安装维修技术服务有限公司
 第2年
第2年

 第2年
第2年 
第2年

来源:常州昆泰机械安装维修技术服务有限公司 时间:2025-03-12 10:02:07 [举报]
IGM机器人无法开机维修 闪屏
油嘴取下,将油封涂液体生胶带,安装紧固07皮带张力检测打开机器人四轴外壳,利用张力测试仪测试机器人皮带张力(频率)是否正常08电池更换更换川崎机器人本体编码器电池保持机器人处于正常上电状态(前提)打开机器人一轴尾部电池外盖。机器人过压维修涉及对机器人系统中因电压过高而引发的故障进行诊断和修复。过压故障可能会导致电路损坏、电子元件烧毁或其他严重问题。以下是机器人过压维修的一般步骤和辨析:
(1)诊断过压原因:
电源问题:检查电源供应是否稳定,是否有过高的电压输出。
电路故障:检查电路板上的元件是否损坏,如电容器、电阻器或集成电路。
传感器或控制器故障:这些元件可能误读电压值,导致过压。
外部干扰:如电磁干扰(EMI)或静电放电(ESD)可能导致电压异常。
其余的事情交给我们,优势供应各大工业机器人产品,工业机器人备件售后服务:产品提供24小时在线技术服务,产品质保期12个月,免费提供产品升级优势提供ABB,KUKA,Yaskawa安川,FANUC发那科。 准备注油04注油口加油05出油口处理废油06电气柜维保部分拆解07电气柜关键部件清理08皮带张力检测09本体编码器电池更换安川维修案例发那科机器人维修ABB机器人维修安川机器人维修库卡机器人维修川崎机器人维发那科维修案例ABB维修案例安川维修案例库卡维修案例川崎维修案例飞克安川维修案例安川机器人MS。
(2)当模式选择开关在软件装备-->机器单位-->ROB_1检察设备前次检验后的出产时候2.进入主法式main()-->PP移至MAIN-->挪用例行程序……3.ServiceInfo法式,转到……4.示教器使能上点,“运转按钮……5.断根运转时候,挑选1/2/3……6.断根时候Reset,YES7.运转法式竣事,Exit.清零法式竣事,检察时候。备注:1.挪用例路程序,手动上电,不要松示能按钮。2.例路程序若是不克不及履行,打消例路程序,查抄毛病日记。
IGM机器人无法开机维修 闪屏
(2)安全防护措施:
在维修前,确保断开机器人的电源,并使用适当的防护工具,如绝缘手套和防护眼镜。
使用电压表或示波器测量电压,确保在维修过程中电压处于安全范围内。
(3)修复或更换损坏元件:
如果发现电路板上的元件损坏,如电容器爆裂或电阻器烧焦,应将其更换为新的元件。
如果传感器或控制器出现故障,可能需要对其进行修复或更换。
(4)检查和调整电路:
检查电路板上的连接和焊接点,确保它们没有松动或短路。
根据需要调整电路参数,如电阻值、电容值或电感值,以确保电路正常工作。
ABB伺服马达维修,安川MOTOMAN伺服电机维修,IGM伺服电机维修,三洋伺服电机维修等,技术直线:工控设备维修工控设备维修>贝加莱伺服电机维修2产品编:Pro工控设备维修 |产品名称:贝加莱伺服电机维修2产品编:Pro产品伺服驱动器和伺服电机的在21世纪工业生产设备上大规模运用已成为一。并通过巧妙的设计改变了示教盒的重心,改善了整体的衡性,使示教、操作变得更轻松。通过金属接头及塑料护套加强了电缆接头处的防护,再也不用担心由于拉拽刮擦造成的电缆损坏。增加了附加轴切换的快捷键及电……FANUC发那科示教器特点减轻了自重,并通过巧妙的设计改变了示教盒的重心,改善了整体的衡性,使示教、操作变得更轻松。通过金属接头及塑料护套加强了电缆接头处的防护,再也不用担心由于拉拽刮擦造成的电缆损坏。增加了附加轴切换的快捷键及电源指示灯,简化了操作步骤。可在示教盒上选装USB接口,使程序的备份导入变得更方便。发那科示教器是通过示教盒上的键控和显示功能,使操人员顺利实现对变位机运动的示教控制,并把信息反馈给操作人员。
拆开控制柜后,电路板上粉尘堆积很严重,对调板卡是在对柜内清灰之后的操作,故而判断导致此类故障发生的原因是因为控制柜防尘处理没做好,造成的电路接触不良,ABB维修案例发那科机器人维修ABB机器人维修安川机器人维修库卡机器人维修川崎机器人维发那科维修案例ABB维修案例安川维修案例库卡维修案例川崎维修案例。我们可提供备件使用,您不需要停产,不需要等待!Panasonic松下伺服驱动器维修报警代码11号报警,控制电源欠电压,控制电源逆变器上P。N之间电压低于规定值。驱动器内部电路有缺陷等原因。12号报警,控制电源过电压,控制电源逆变器上P。N之间电压超过规定值,驱动器内部电路有缺陷等原因。13号报警,主电源欠电压,发生瞬时断电,电源接通的冲击电流导致电压跌落,缺相或驱动器内部电路有缺陷等原因。14号报警,过电流或接地错误,驱动器内部电路或IG或其他部件有缺陷,或电机电缆(U,W)短路或接地,或电机烧坏了。21号报警。驱动器控制板电路有缺陷。60号报警:驱动器控制板电路有缺陷。不能正反转:驱动器控制回路有缺陷。
滤波,逆变(直流变交流),制动单元,驱动单元,检测单元微处理单元等组成的,ABB整流电路由VD1-VD6六个整流二极管组成不可控全波整流桥,对于380V的额定电源,一般二极管反向耐压值应选1200V,二极管的正向电流为电机额定电流的1.414-2倍。
IGM机器人无法开机维修 闪屏
(5)测试和验证:
在完成修复后,重新连接电源,并进行系统测试,确保电压在正常范围内,且机器人能够正常工作。
如果可能,使用示波器或其他诊断工具进行进一步的验证。
(6)预防措施:
使用合适的电源保护设备,如稳压器或浪涌保护器,以减少过压的风险。
定期检查和维护机器人系统,确保电路和元件处于良好的工作状态。
避免在电磁干扰较大的环境中使用机器人。
在,大部分的电力站和变频站都是ABB做的,ABB的产品优势在于运动控制和自动化的整合,ABB的机器人算法是四大主力品牌中的,不仅仅有的运动控制解决方案,ABB还讲究机器人的整体特性,在重视品质的同时也讲究机器人的设计。然后把剩下的所有文件还原回控制柜中;如果出现SRVO-038报警,进行SRVO-038报警的消除步骤并做好MASTERING(可改参数或选择适当的方式做MASTERING)。注意:在的机器上,开机进入的是OPRATER权限的界面,默认是QUICKMENU,并且不能进行QUICK/FULLMENU的切换。不能在一般模式下面进行备份,但可进入CONTRALSTART模式中备份和还原。在INTALL登陆后,不能进行的DISABLE和ENABLE。IC控制柜方法条件:在丢失前做过文件的备份;将MC备份中的SYSPASS.SV文件删除掉,然后拷进CF卡中;将机器进行一次初始化启动,然后将CF卡中的备份导入即可。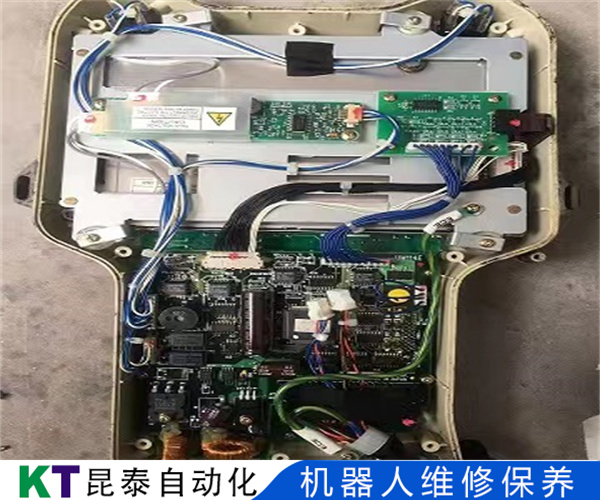
在供油油质,油量,油压,传动负荷等都正常的情况下,减速机的输出大齿轮转速,承受的转矩,受力,齿轮的直径和单重,毛坯锻造,机械加工和热处理,安装要求难度也,若在技术,控制,质量检验等某一道工序中把关不严。 长科企业工控设备维修服务承诺:步:询问用户设备故障第二步:根据用户的故障描述,确认被损坏的器件,分析维修恢复的可行性第三步:打开被维修的设备,确认被损坏的器件,分析维修恢复的可行性第四步:根据被损坏器件的工作。
注释如果在执行该步骤时意外松开了SHIFT(位移)键,则需重复上述步骤。9关闭示教操作盘开关,松开DEADMAN(紧急时自动停机)开关。10如果机器人未处于真正的超程状态,则检查放大器PCB上的CRM68和CRF7连接。飞克机器人维修(东莞)有限公司(faykrr)能够高质地修那科工业机器人的控制器、示教器、I/O板、驱动器、伺服电机、计算机板、电源板、安全板等所出现的各种故障。库卡维修案例发那科机器人维修ABB机器人维修安川机器人维修库卡机器人维修川崎机器人维发那科维修案例ABB维修案例安川维修案例库卡维修案例川崎维修案例飞克广东省东莞市松山湖园区中集智谷23栋12楼库卡维修案例库卡KUKA焊接机器人弧焊程序维修:2020/11/起弧指令起弧指令“ARCON”包含起弧、程序号和焊枪点到焊缝起点的移动参数。TgEfOguVtKf
标签:机器人维修保养