常州昆泰机械安装维修技术服务有限公司
 第2年
第2年

 第2年
第2年 
第2年

来源:常州昆泰机械安装维修技术服务有限公司 时间:2025-03-12 08:49:54 [举报]
柯马COMAU机器人按键板失灵维修 报警
ABB6442300T61031G19ABBMC19PABBPS130/6-120-P-PMB-3738ABBELMOPSA130/6-90-P-PMB-4415ABBMOTORSE183012ABBROBOTICS1FK6084-6A2Z-9229ZS04伺服电机等。当你的机器人出现短路、无法开机、LED全亮、报警、上电无反应、无通讯、上电不动作、过热、冒烟、无法启动、内部错误、LED2红灯亮、竖线、花屏、黑屏、按键不良、白屏、闪屏、启动报警、温度高等故障维修可以及时联系昆泰自动化。
工业机器人服务商,服务项目包含:工业机器人销售,机器人备件,机器人维修,机器人保养,机器人调试,机器人改造和机器人培训等,主要针对ABB,库卡KUKA,发那科FANUC,安川,川崎,史陶比尔,OTC。还有一块要紧的电路板-CPU主板。其技术含量高,维修难度大,一般包括变频器的控制端子电路,数字/模拟的输入/输出控制信号电路;操作显示面板与CPU的连接电路;CPU本身投入工作所需的基本电路,如晶振电路、复位电路、电源电路、与外部存储器的连接电路等;与上位机或PLC的通信电路,如RS485电路。由电源/驱动板来的各类检测保护电路(前级或前置电路)的电压、电流、温度等信号,经由后级各类保护信号处理电路(或称故障信号输出电路)放大或转换为开关量信号后,再送入CPU相关引脚。这部分电路也有CPU主板电路的一部分,而且是相当大的一部分。安川CPU主板维修当中出彩的地方也正在这里。机器人变频器的CPU主板电路解析(1)变频器的控制端子电路外围电路(2)变频器开关电源电路元器件件及单元电路的命名CPU主板。
这种机器人在使用的过程当中一般情况下是不容易出现故障的,但是随着使用的不断的延长,随着可能会采用了一些错误的操作,那么就很有可能会提示出现一些故障,简单的故障解决起来当然是比较容易的,但如果是一些复杂的故障的话。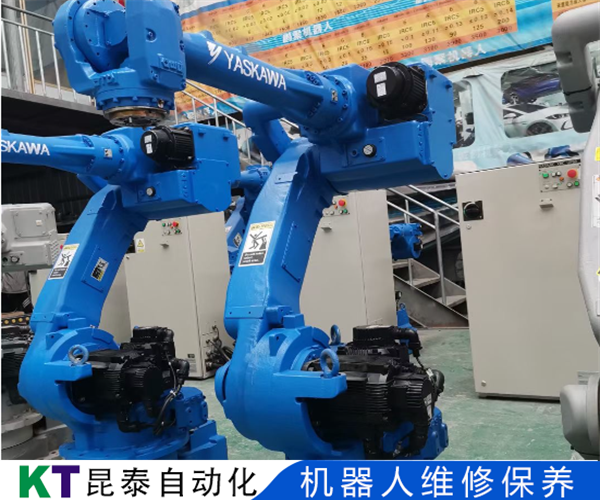
短周期电弧螺柱焊机维修,服务工业机器人产品品牌还包括FANUC法那科机器人、KUKA库卡机器人、IGM机械手、ABB机器人、安川Motoman莫托曼机械手、CLOOS克鲁斯机械手等。技术机器人焊机维修机器人焊机维修>机器人焊机-MILLER米勒焊机故障维修服务产品编:Pro机器人焊机维修|产品名称:机器人焊机-MILLER米勒焊机故障维修服务产品编:Pro产品机器人焊接工作站焊机维修-米勒焊机维修美国MILLER米勒焊机故障维修服务进口焊机维修报价广州安川机电科技有限公司。技术MILLER米勒焊机维修型号包括:MIG焊机-Deltaweld系列Deltaweld402/602/852MIG焊机-Invision系列Invision354MP/456MP氩弧(TIG)焊机Dynasty200SD/200DX氩弧(TIG)焊机Dynasty300SD/300DX氩弧(TIG)焊机Maxstar200DX/200LX/200SD氩弧(TIG)焊机Maxstar300SD/300DX/300LX氩弧(TIG)焊机Syncrowe250DX/350LXTIG焊机-Maxstar700和Dynasty700多功能焊机Dimension302/562/1250多功能焊机XMT304CC/CV,350CC/CV,456CC/CV发电机驱动焊机MillerDu-OpCC/CV发电机驱动焊机BigBlue500X和600XCC/CV全数字焊机Axcess300/450/675全数字焊机Auto-Axcess300/450/675埋弧焊机HDC1500/HDC1500(DX)气体保护焊机354MPDynasty700米勒焊机Maxstar300系列米勒焊机Dynasty200系列米勒焊机Dynasty300系列米勒焊机Syncrowe250DX/350LXTIG焊机美国米勒焊机产品用途:交直流焊机、可焊碳钢、不锈钢、铝。
柯马COMAU机器人按键板失灵维修 报警
1、停止运行:如果机器人出现过载故障,应立即停止其运行,以防止进一步的损坏或安全问题。
2、检查负载情况:检查机器人的负载的重量、位置和分布情况。确保负载没有超出机器人的设计和规格范围。
3、检查机械部件:仔细检查机器人的机械部件,如关节、齿轮、传动系统等。寻找损坏、磨损或松动的迹象。必要时,进行维修或更换损坏的部件。
●具有6轴的多关节结构,可实现灵活搬运可用于从立式收纳盒中取出基板以及伴有倾斜,翻转等姿势变换的所有搬运工作●拥有充足的可搬运能力的长臂延伸模式有能处理G10基板的臂长,其行程延伸至3.6m,上下行程为4.8mNACHI那智越搬运玻璃基板的机器人ST-CF系列 ST133CF/16。 为了安全地进行各项工作请仔细和充分理解安全手册,全部相关法律,规章制度,以及各章节的所有的安全说明并在实际工作中准备合适的安全措施指示有关机器人规格,处理,示教,操作和维护的注不遵守指出的内容可导致即将临头的伤害或死亡。
4、检查控制系统:检查机器人的控制系统,包括传感器、编码器、驱动器和控制器。确保传感器和编码器的读数准确,驱动器输出稳定,控制器工作正常。修复或更换故障的控制系统元件。
5、检查机器人环境:检查和排除机器人工作环境中的异常情况。例如,清除阻塞物或障碍物,改善温度、湿度或振动条件等。
6、测试运行:在进行维修和调整后,进行运行测试以验证机器人是否正常工作。确保机器人的负载在正常工作范围内,没有发生过载故障。
另外紧急客户可以提供KUKA机器人伺服组件KSP相应同型号的备件供客户使用,避免因机器人损坏而造成停产:出仓维修件KUKA机器人KUKA安全逻辑电路板都经过检测,有安装到我方机器人上测试,确实送到客户方能正常使用,避免无法测试返修给客户带来设备测试风险和停机损失。保修承诺:对维修的KUKA机器人安全逻辑电路板产品,公司提供数月的保修服务。库卡安全板销售以及维修型号包括:KUKA安全逻辑电路板ESC-C1V1.20/库卡机器人安全逻辑电路板ESC-CIV1.40/库卡机器人备件系列包括:库卡KUKA总线模块库卡KUKA主板:库卡机器人MFC多功能板卡,I/O板,分解数字转换器电路板RDW板。 控制电源过电压,控制电源逆变器上P,N之间电压超过规定值,驱动器内部电路有缺陷等原因,13号报警,主电源欠电压,发生瞬时断电,电源接通瞬间的冲击电流导致电压跌落,缺相或驱动器内部电路有缺陷等原因,14号报警。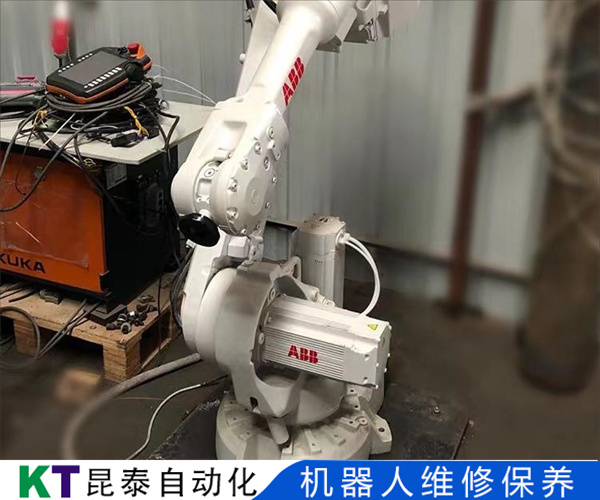
利用robotstudio进行传输系统生成成功,设备恢复正常安装过程预计30分钟左右,启动完成后,新系统创建成功,主计算机状态也恢复正常飞克机器人维修有限公司(faykrr)能够高质的提供ABB机器人控制柜维修,ABB机器人示教器维修,ABB机器人I/O板维修,ABB机器人驱动器维修,ABB机器。 技术ABB机器人伺服驱动模块维修型号包括:ABB机器人驱动模块DSQC6643HACABBDSQC236C3HAB8798-1机器人伺服驱动单元S3和S4控制器ABBDSQC266B3HAB8797-1机器人伺服驱动单元S4控制器ABBDSQC236B3HAB8797-1机器人伺服驱动单元S3和S4。
如图8,这步配置旋转轴时不需要执行:文件/名录管理,把所有的文件移至右边。出现“安全配置的校验总和不正确”故障,执行“配置/安全配置”。库卡机器人控制柜维修,库卡机器人示教器维修,库卡机器人I/O板维修,库卡机器人驱动器维修,库卡机器人伺服电机维修,库卡机器人计算机板维修,库卡机器人电源板维修,库卡机器人安全板维修发那科维修案例发那科机器人维修ABB机器人维修安川机器人维修库卡机器人维修川崎机器人维发那科维修案例ABB维修案例安川维修案例库卡维修案例川崎维修案例发那科维修案例发那科机器人维修方法-机床震动/12/发那科机器维修故障及解决方法发那科机器维修机床抖动20种故障分析(1)故障现象:Y向坐标抖动故障原因分析:查:系统环。
柯马COMAU机器人按键板失灵维修 报警
1、识别错误代码:,需要仔细阅读和理解机器人显示的错误代码。这些代码通常可以提供关于故障原因的线索。
2、检查硬件:根据错误代码,检查可能出现问题的硬件部分。这可能包括电机、传感器、电路板、电源等。检查这些部件是否有明显的损坏或故障。
3、检查软件:如果错误代码指向软件问题,那么可能需要检查机器人的程序或操作系统。这可能包括检查是否有的软件更新,或者是否需要对程序进行修改。
4、重启机器人:有时,简单的重启就可以解决一些临时性的问题。尝试关闭机器人,等待一段时间后再重新启动。
关上安全门后按下系统复位按钮,确认画面上的门开关报警信息是否消失,3.外部紧急停止开关的检查,检查方法:机器人处于停止状态下,机器人没有显示任何报警信息,按下外部急停按钮,确认画面是否显示[SRVO-007ExternalE-stop"自诊断信息,按MENU--选择4ALARM显示报警画面。
第七代大型机器人作为新一代的技术产品具备多项改进和提升,这些改进主要得益于对客户需求的细致分析和广泛的工程研究,ABB机器人IRB6700与其替代的之前版本相比,更为稳健且维修简化,是150-300kg负载等级中性能且总体拥有成本(TOC)的机器人。即O[65]:PLC_O_END_ELECTRODE1。测量磨损电极补偿量设定测量磨损电极补偿量设定:参考基准,来测量换帽、修磨带来的磨损量,使电极补偿相应的磨损量。原理如下:磨损量是参考个电极补偿基准来测量的,所以第二点和个电极补偿基准设定的第二点是同一点。前提条件:当前选择的焊枪做过压力标定及压力测试合格。个电极补偿基准设定已执行,基准已确定。示教步骤:同个电极补偿基准设定相同,只是inlineform中选择SAME。如图所示:运行补偿基准点时以下会按顺序发生:焊枪移动至点。焊枪以初始化压力加压两次。总的磨损量保存在EG_WEAR[]变量中。焊枪移动至第二点。动电极以初始化压力加压标定板。此时变量EG_WEAR_FLEX[]andEG_WEAR_FIX[]都>0且和实际磨损值相同。
机器人数字式交流伺服系统MHMA2KW,试机时一上电,电机就振动并有很大的噪声,然后驱动器出现16号报警,该怎么解决?这种现象一般是由于驱动器的增益过高,产生了自激震荡。请调整参数N.N.N.12,适当降低系统增益。安川机器人伺服电机在很低的速度运行时,时快时慢,象爬行一样,怎么办?伺服电机出现低速爬行现象一般是由于系统增益太低引起的,请调整参数N.N.N.12,适当调整系统增益,或运行驱动器自动增益调整功能。机器人交流伺服系统在控制方式下,控制系统输出的是脉冲和方向信号,但不管是正转指令还是反转指令,电机只朝一个方向转,为什么?安川机器人维修,机器人交流伺服系统在控制方式下,可以接收三种控制信脉冲/方向、正/反脉冲、A/B正交脉冲。
TgEfOguVtKf
标签:机器人维修保养