常州昆泰机械安装维修技术服务有限公司
 第1年
第1年

 第1年
第1年 
第1年

来源:常州昆泰机械安装维修技术服务有限公司 时间:2024-10-30 08:59:52 [举报]
博裕工业机械臂维修保养处理流程
无法进入系统,工控机不识别光驱,硬盘,软驱,串口,并口,网卡口等,工控机按下开关,没有任何反应(无法开机),工控机经常死机,掉电或自动重启,工控码遗忘,无法进入系统,工控机电池无法充电,技术直线:工控设备维修工控设备维修>工控机维修1产品编:Pro工控设备维修 |产品名称:工控机维修1产品。作为一家维修及保养工业机器人的公司,维修检测设备,不限品牌及型号,高度化。我们的技术师傅有着丰富经验和维修资格,能为客户解决各种现场疑难问题,周边地区还提供上门服务,更有负责同事一对一咨询。
以整个系统本身的性能和质量品质,以机器人为例来说,原装进口的机器人本身维护间隔可达70000小时以上,常用耗材均按照编号预留合理的库存备件,以及时响应可能的维护与更换,我们的技术服务队伍为用户提供7*24小时的远程响应服务。拥有非常丰富的行业经验,能够根据用户的需求提供相对应的解决方案,!三协机器人减速机VRSF-LB-7D-1100-ST洁净机器人三协机器人电机HA1LH01备件销售全新二手大量现货|产品参数名称:三协机器人电机型HA1LH01数量:长期备有现货价格:电议【原装及二手备件】优势提供机器人维修、机器人保养、机器人调试、机器人安装、机器人培训、研发服务。供应及回收三协机器人及周边配件,提供维修服务。李先生三协机器人电机HA1LH01备件找,我们基本上进口产品都能采购,只要您提供品牌和型号,其余的事情交给我们!优势供应各大工业机器人产品、工业机器人备件服务:产品提供24小时在线技术服务、产品质保期12个月。
1.在示教器主菜单中选择程序数据2.找到数据类型Speeddata后,新建3.初始值,Speeddata四个变量含义分别为:v_tcp表示机器人线性运行速度,v_rot表示机器人旋转运行速度,v_leax表示外加轴线性运行速度。
动力电缆,编码器电缆是否配线过错,破损或许接触不良,查看带制动器的伺服电机其制动器是否现已翻开,监督伺服驱动器的面板承认脉冲指令是否输入,Run运转指令正常,操控形式挑选方位操控形式,伺服驱动器的输入脉冲类型和指令脉冲的是否共同,确保正转侧驱动制止。 安川YASKAWA机器人首钢Motoman莫托曼示教器维修:如ERC示教盒维修,MRC示教器维修,XRC教导盒维修,NX100机器人触摸屏维修,DX100示教器维修服务中心长期承接安徽机械手示教盒维修。
博裕工业机械臂维修保养处理流程
1、故障识别:,需要确定机器人的具体故障。这可能涉及到观察机器人的行为,查看是否有任何异常的指示灯或错误信息,或者检查机器人的日志文件以获取更多信息。
2、初步检查:在确定了故障之后,需要进行初步的检查。这可能包括检查机器人的电源和电线,查看是否有明显的物理损坏,或者检查机器人的软件和硬件。
3、诊断测试:如果初步检查无法确定问题所在,那么可能需要进行更深入的诊断测试。这可能涉及到运行特定的测试程序,以检查机器人的各个部分是否正常工作。
4、题:在进行了诊断测试之后,应该能够到问题的具体位置。这可能是一个硬件故障,比如电机或传感器损坏,也可能是一个软件问题,比如程序错误或配置问题。
5、维修或更换:一旦到问题,就可以进行维修或更换部件。如果是硬件故障,可能需要更换损坏的部件。如果是软件问题,可能需要修复程序错误或重新配置。
6、测试验证:在维修或更换部件之后,需要进行测试以验证问题是否已解决。这可能涉及到运行之前出问题的任务或程序,以确保机器人现在能够正常工作。
新材料,新工艺和新产品,从而推动社会化大生产的历史性大跨越,生产工艺越来越精密,当前精密和超精密加工精度从微米到亚微米,乃至纳米,在汽车,家电,IT电子信息高技术领域和,民用工业有广泛应用,同时,精密和超精密加工技术的发展也促进了机械。大程度地降低返修率。不仅是点对点更换主板的维修,真正做到级维修!abb机器人主板维修、abb机器人驱动器维修、abb示教器维修、abb示教盒维修、abb教导器维修、abb机器人保养、abb机械手维修、abb教导器维修、abb焊机维修、abb机器人电源板维修、abb示教器屏幕更换等周边设备。技术KUKA机器人维修KUKA机器人维修>库卡KPP600-20/驱动电源维修产品编:ProKUKA机器人维修|产品名称:库卡KPP600-20/驱动电源维修产品编:Pro产品库卡KPP600-20/库卡机器人驱动电源KPP600-20/维修,24小时维修服务,广州安川机电科技有限,公司提供上门服务,检测故障。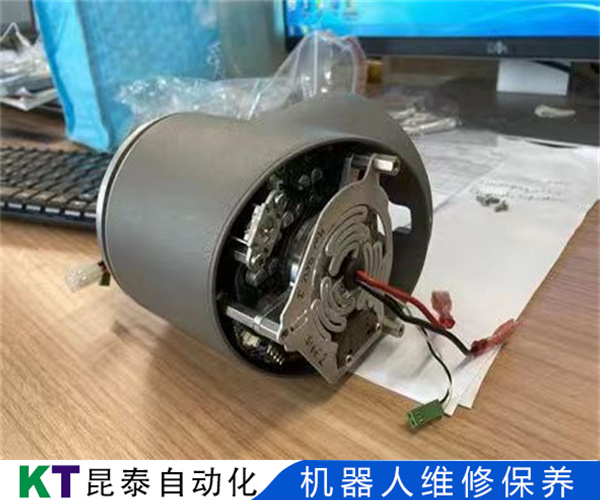
组织了一支经验丰富,技术强劲的维修团队与配备了强大的后备配件库存,资源整合后能以有效的速度和方法为进口示教器维修/示教盒维修/教导盒维修提供质的服务,技术ABB机器人维修ABB机器人维修>ABB示教盒M2000维修产品编:ProABB机器人维修 |产品名称:ABB示教盒M2000维修。常年对各大主流品牌工业电脑保养统记及故障数据分析,工程师相互沟通交流对其硬件和软件做出,发现其优缺点,然后做进一步的升级和产品更新。另一方面中心对各种进品和老式工控机做着协议维保工作,深入了解其原理及特性后本中心有着的检测方法,可对进口停产的产品进行IC级维修服务。工控机维修服务包括:西门子工控机维修,贝加莱工控机维修,研华工控机维修,联想工控机维修,ab罗克维尔工控机维修等。工控机维修故障包括:按键损坏,电源板故障、高压板故障,液晶故障、主板坏、上电黑屏、花屏、暗屏、触摸失灵,不能正常开机、触摸问题、按键问题、屏幕显示问题(屏碎、花屏、白屏、黑屏等)、通讯问题(触摸无反应、触摸反应慢等)、电源故障、主板问题、系统问题等工控机无法安装操作系统;
CALL调用被的程序,GETARG是供调用指令以及宏指令的自变量接收指令,实行指令时,选出被附加在调用指令或者宏指令上的自变量数据,因为在调用程序或者宏程序内会使用到,所以存储在被的局部变数中。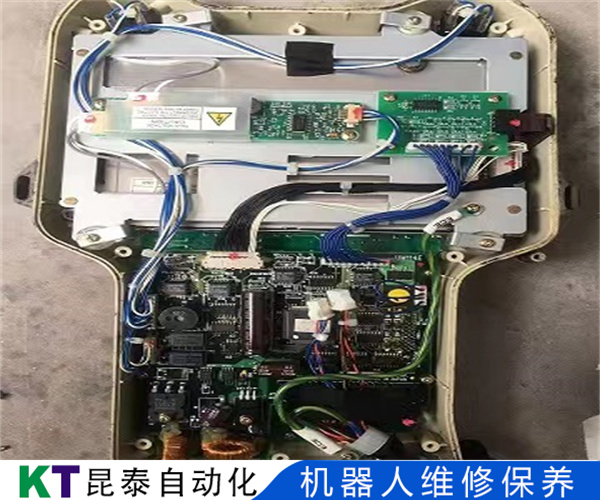
博裕工业机械臂维修保养处理流程
1、需要确定跳闸的具体原因,然后采取相应的处理措施。可能的原因包括负载过大、电源问题、软件故障、电路短路等。
2、如果跳闸是由于负载过大引起的,可以考虑减少机器人的负载,尽量避免在负载高峰期使用机器人。此外,也可以考虑升级机器人的硬件设备,提升其负载承受能力。
3、如果跳闸是由于电源问题引起的,需要检查电源线路是否松动或损坏,并尝试更换电源适配器或使用稳定的电源。如果问题仍然存在,可能需要联系售后服务人员进行检修。
4、如果跳闸是由于软件故障或电路短路引起的,可以尝试重启机器人,看是否能够解决问题。如果问题仍然存在,可能需要升级或重新安装机器人的软件,或者联系人士进行检修或更换相关电路部件。
即O[65]:PLC_O_END_ELECTRODE1。测量磨损电极补偿量设定测量磨损电极补偿量设定:参考基准,来测量换帽、修磨带来的磨损量,使电极补偿相应的磨损量。原理如下:磨损量是参考个电极补偿基准来测量的,所以第二点和个电极补偿基准设定的第二点是同一点。前提条件:当前选择的焊枪做过压力标定及压力测试合格。个电极补偿基准设定已执行,基准已确定。示教步骤:同个电极补偿基准设定相同,只是inlineform中选择SAME。如图所示:运行补偿基准点时以下会按顺序发生:焊枪移动至点。焊枪以初始化压力加压两次。总的磨损量保存在EG_WEAR[]变量中。焊枪移动至第二点。动电极以初始化压力加压标定板。此时变量EG_WEAR_FLEX[]andEG_WEAR_FIX[]都>0且和实际磨损值相同。 再次通过连结指令予以连结,通过此时的对合动作,执行在参照点的对合,复活,电池安装型焊枪的情形:连结焊枪并进行对合,由此便可以使用焊枪,对应措施直接改变系统变量,使焊枪分离,将如下系统变量设定为0,执行控制器的电源off/on操作。
当前速度为运动指令内的speeddata(如上图的v1000)乘以当前程序速度百分比(如上图的)2.若运动指令中,使用\v:=100,则该语句使用100mm/s的速度代替原有v1000运行,如下图3.若运动指令中,使用\T:=1,则完成该运动语句为1s,代替原有v1000速度4.ABB机器人还提供以下速度指令5.可以使用速度指令Velset80,50指令来批量速度。其中80表示后续速度乘以80%,但运动语句的速度不能超过50mm/s。下图机器人将以50mm/s速度运行下图机器人将以700mm/s速度运行6.SpeedRefresh80表示之后运动语句的机器人会以80%速度运行7.可以在程序一开始插入如下指令限制单轴速度SpeedLimAxisROB_1,1,20;表示1轴大速度为20°/s。 此时再运行PTPINIT1ServoGun=1Same,则EG_WEAR_FLEX[](动电极磨损量)=0,磨损值会全部累加至静电极,如果个电极补偿基准设定时,补偿基准值过大,则电极修磨磨损后就出现补偿值两极差距过大的情况。
库卡机器人维修更换控制系统柜主机操作步骤:将机器人控制柜柜门打开,使用手机把控制主机的连接线情况拍照留存后将机器人控制系统主机接口供电电源及所有插头连接线全部拔下,拆开主机运输安全防护螺栓及放下滚花螺母,拆下的机器人控制系统主机向上拉起将其取出,将新的机器人控制系统主机装入并加以固定。
TgEfOguVtKf
标签:机器人维修保养